强化学习-易混淆点
GAE 和优势函数
概念 说明 优势函数 A(s,a) Q(s,a)−V(s),衡量动作比平均情况好多少 广义优势估计 GAE 一种计算优势函数方法,用TD误差的加权和估计优势,超参数 λ 控制偏差-方差权衡
状态价值函数 vs 动作价值函数
状态价值函数

动作价值函数
优势函数
在状态 s 下选择动作 a 比平均情况(即遵循当前策略)好多少
A(s,a)=Q(s,a)−V(s)
- 求解优势函数:广义优势估计(GAE)
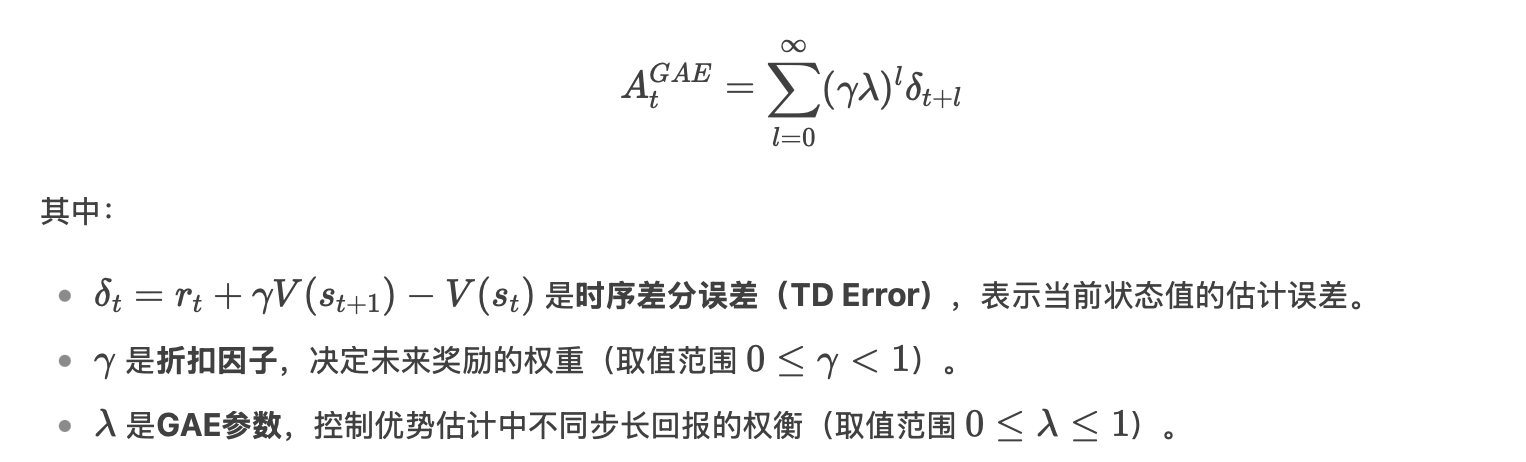
广义优势估计(GAE)
通过指数加权平均不同步长的优势估计(从1步到无穷步),结合γ和λ的幂次衰减,实现平滑的回报估计。
关系
常见强化学习算法优缺点
Q-Learning - Off-policy - 值函数
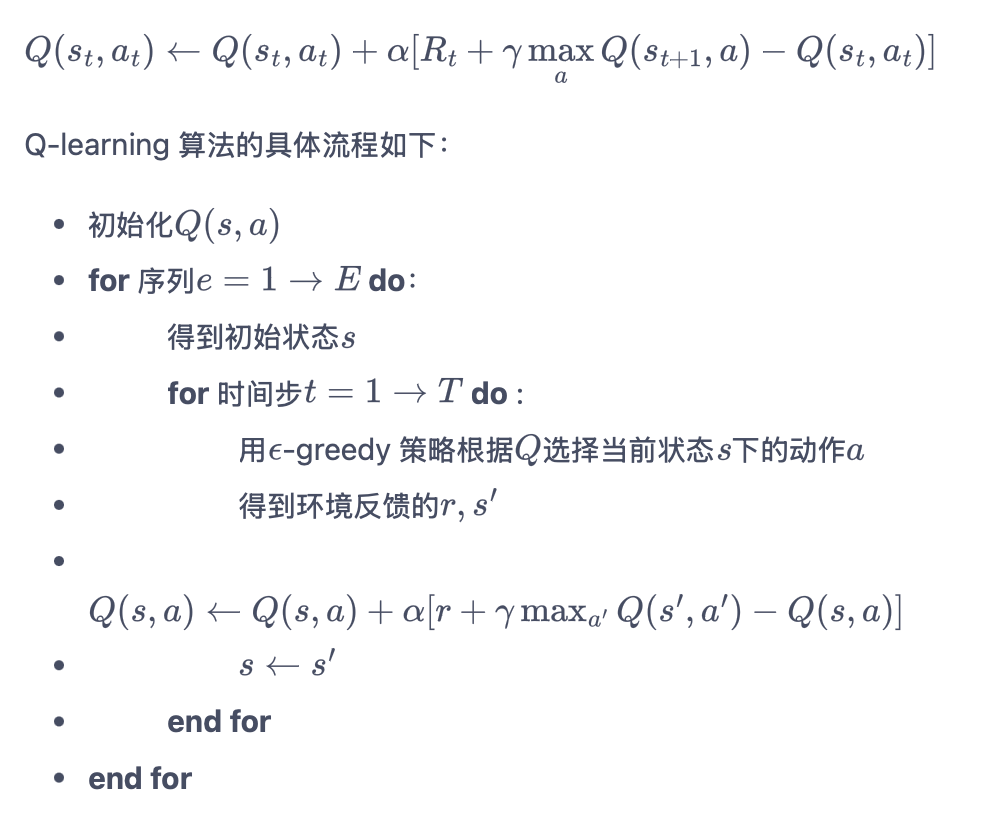
- 缺点:用表格存储动作价值。只在 环境的状态和动作都是离散的,并且空间都比较小 的情况下适用。
DQN - Off-policy - 值函数
适用于连续状态下离散动作的问题,可以使用ε-贪婪策略来平衡探索与利用。采用经验回放。
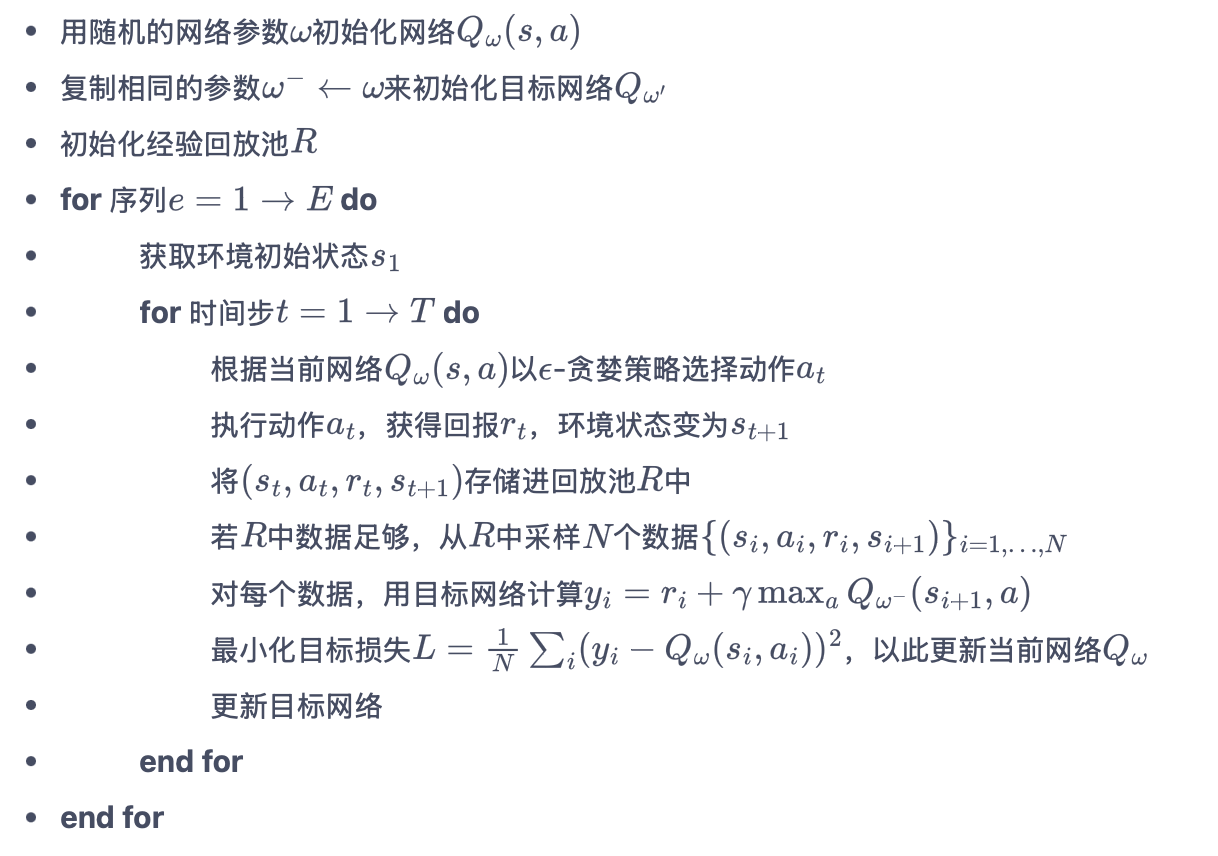
训练两个Q网络:训练网络 + 目标网络 —— 训练过程中 Q 网络的不断更新会导致目标不断发生改变,故暂时先将 TD 目标中的 Q 网络固定住。
- 缺点:仅限离散动作;训练资源消耗大;超参数敏感。
REINFORCE - 策略梯度
策略梯度

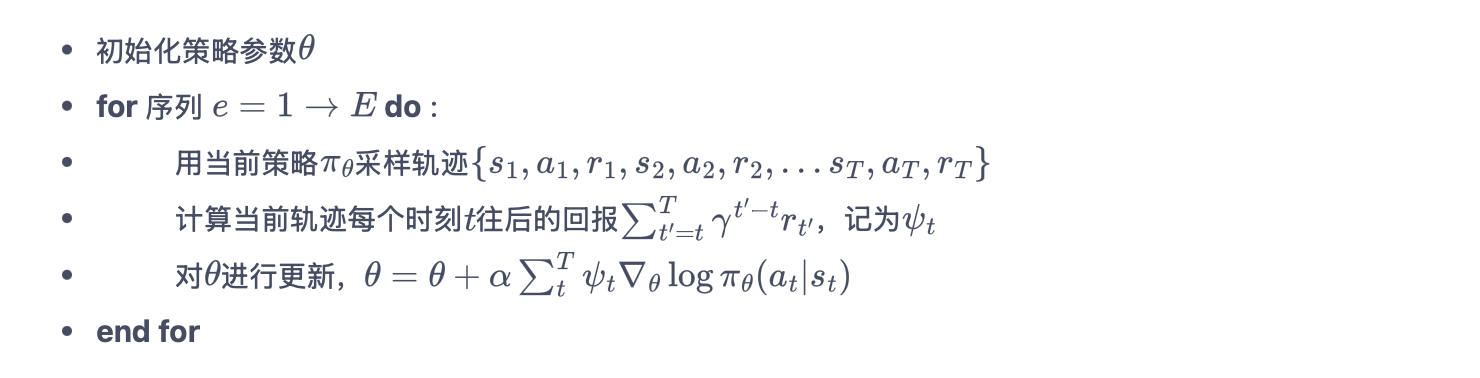
- 缺点:高方差;需大量样本;训练效率低
Actor-Critic - 策略+值函数
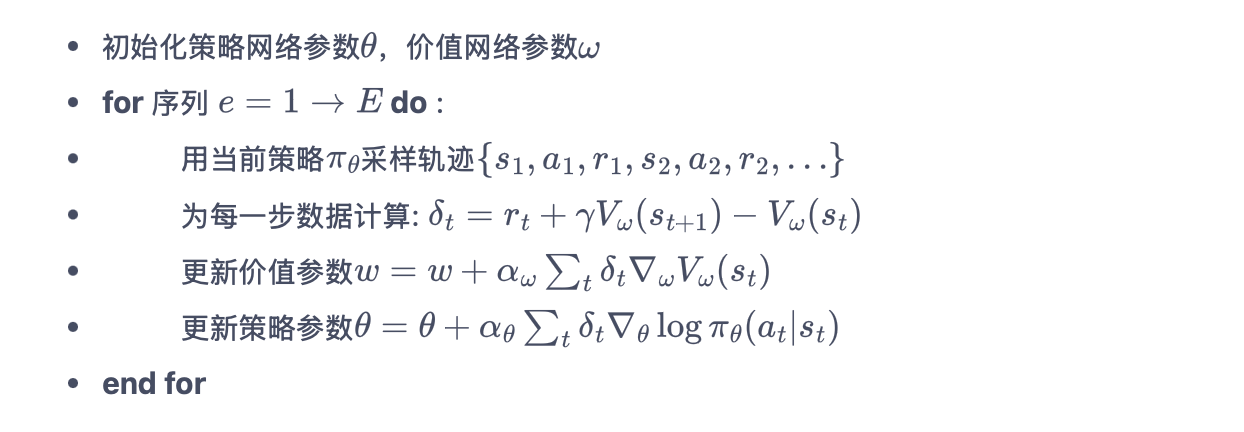
- 缺点:在实际应用过程中会遇到训练不稳定的情况。
TRPO - online - Actor-Critic
输入: - 初始策略参数 θ, 价值网络参数 ϕ - 最大迭代次数 K - 信任域半径 δ (如 0.01) - 折扣因子 γ, GAE 参数 λ for k = 1 to K do: # 1. 采样轨迹 使用当前策略 π_θ 与环境交互,收集轨迹 {sₜ, aₜ, rₜ, sₜ₊₁} # 2. 计算优势估计 对每个状态动作对 (sₜ, aₜ): δₜ = rₜ + γ * V_ϕ(sₜ₊₁) - V_ϕ(sₜ) # TD误差 Aₜ = GAE(δₜ, γ, λ) # 广义优势估计 # 3. 计算策略梯度 g = ∇θ [ (πθ(aₜ|sₜ) / πθ_old(aₜ|sₜ) * Aₜ ] # 重要性采样梯度 # 4. 共轭梯度法求解更新方向 F = 计算Fisher信息矩阵(πθ, 样本) # F = E[∇logπ ∇logπᵀ] x = 共轭梯度法(F, g) # 解 Fx = g Δθ = √(2δ / (xᵀFx)) * x # 缩放以满足KL约束 # 5. 线性搜索找可行步长 for j = 0, 1, 2,... do: θ_new = θ + α^j * Δθ # α ∈ (0,1) 如 α=0.5 KL = E[ KL(πθ_old(·|s) || πθ_new(·|s)) ] L_new = E[ (πθ_new/πθ_old) * Aₜ ] if KL ≤ δ and L_new ≥ L(θ_old): θ = θ_new # 接受更新 break # 6. 更新价值网络 最小化 MSE: ϕ = argmin ∑(V_ϕ(sₜ) - Rₜ)^2 # Rₜ为回报-to-go end for- 缺点:近似会带来误差(重要性采样的通病);解带约束的优化问题困难
TRPO 和 PPO 都属于on-policy算法,即使包含重要性采样过程,但只用到了上一轮策略的数据,不是过去所有策略的数据。
总结深度策略梯度方法
- 相比价值函数学习最小化TD误差的目标,策略梯度方法直接优化策略价值的目标更加贴合强化学习本质目标
- 分布式的 actor-critic 算法能够充分利用多核 CPU 资源采样环境的经验数据,利用 GPU 资源异步地更新网络,这有效提升了 DRL 的训练效率
- 基于神经网络的策略在优化时容易因为一步走得太大而变得很差,进而下一轮产生很低质量的经验数据,进一步无法学习好
- Trust Region 一类方法限制一步更新前后策略的差距(用 KL 散度),进而对策略价值做稳步地提升
- PPO 在 TRPO 的基础上进一步通过限制 importance ratio 的 range,构建优化目标的上下界,进一步保证优化的稳定效果,是目前最常用的深度策略梯度算法
常见强化学习算法的总结
算法 类型 适用场景 优势 劣势 Q-Learning 值函数(Off-policy) 离散动作、中小规模状态空间(如迷宫、简单游戏) 直接学习最优策略,无需遵循当前策略;实现简单 高估Q值风险;无法处理连续动作;高维状态需离散化 SARSA 值函数(On-policy) 离散动作、需安全探索的场景(如机器人避障) 策略保守,避免高风险动作;适合在线学习 可能收敛到局部最优;需遵循当前策略 DQN 值函数+深度网络 高维状态(如图像输入)、离散动作(如Atari游戏) 处理复杂状态;经验回放提高稳定性;适合端到端学习 仅限离散动作;训练资源消耗大;超参数敏感 REINFORCE 策略梯度(蒙特卡洛) 简单策略优化、连续或离散动作(如随机策略需求) 直接优化策略;支持连续动作 高方差;需大量样本;训练效率低 Actor-Critic 策略+值函数 连续/离散动作、需平衡方差与偏差(如机器人控制) 结合策略梯度与TD误差,收敛更快;支持在线更新 实现复杂;依赖Critic的准确性;需调参 PPO 策略优化(On-policy) 复杂连续/离散控制(如人形机器人、多智能体协作) 训练稳定(Clipping机制);样本效率高;支持并行环境 超参数敏感(如Clipping范围);计算资源需求较高 DDPG 确定性策略梯度(Off-policy) 高维连续动作空间(如无人机控制、精细操作) 输出确定性动作;适合精细控制;结合目标网络稳定训练 探索效率低(依赖噪声);超参数敏感;对高维状态支持有限 TD3 确定性策略梯度改进版 复杂连续控制(DDPG的改进版) 缓解Q值高估(双Critic网络);延迟策略更新提升稳定性 实现更复杂;训练时间较长 SAC 最大熵策略(Off-policy) 高维连续动作、需高探索性场景(如复杂物理仿真) 平衡探索与利用(熵正则化);鲁棒性强;适合稀疏奖励任务 计算复杂度高;实现难度大 蒙特卡洛方法 无模型(On-policy/Off-policy) 回合制任务(如棋类游戏胜负评估) 无偏差;简单直观 高方差;需完整Episode;样本效率低 Dyna-Q 基于模型 已知或可学习模型的环境(如仿真调度、安全关键任务) 样本效率高;支持规划与学习结合 模型误差影响策略;复杂环境建模困难 A3C/A2C 异步策略梯度 分布式训练、并行环境交互(如多线程游戏AI) 加速训练(异步采样);适合大规模计算资源 实现复杂;同步版本(A2C)效率较低