深度学习基础 - 激活函数和epoch, batch, iteration
写这篇文章有两个原因:一是因为我好久没看Activation Function又忘了,来复习一下;另一个是因为我想赶紧把这个风格的摄影作品用完,开启下一个系列 :)
引入激活函数的目的:加入非线性因素的,解决线性模型所不能解决的问题。通过最优化损失函数的做法,我们能够学习到不断学习靠近能够正确分类的曲线。
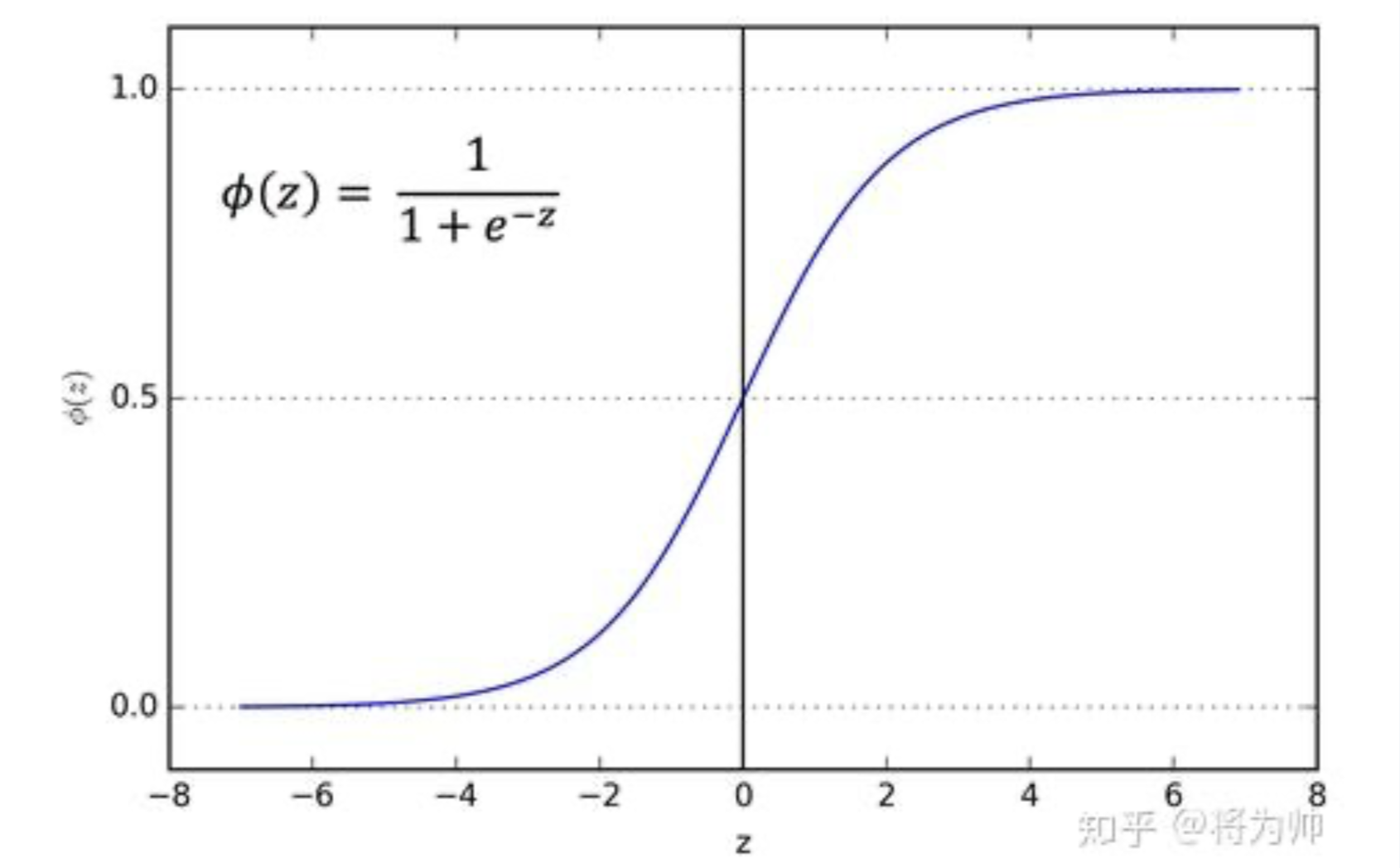
1 sigmoid 函数
sigmoid 函数是一个 logistic 函数:输入的每个神经元、节点或激活都会被缩放为一个介于 0 到 1 之间的值。
从图像可以看出,函数两个边缘的梯度约为0,梯度的取值范围为(0,0.25):
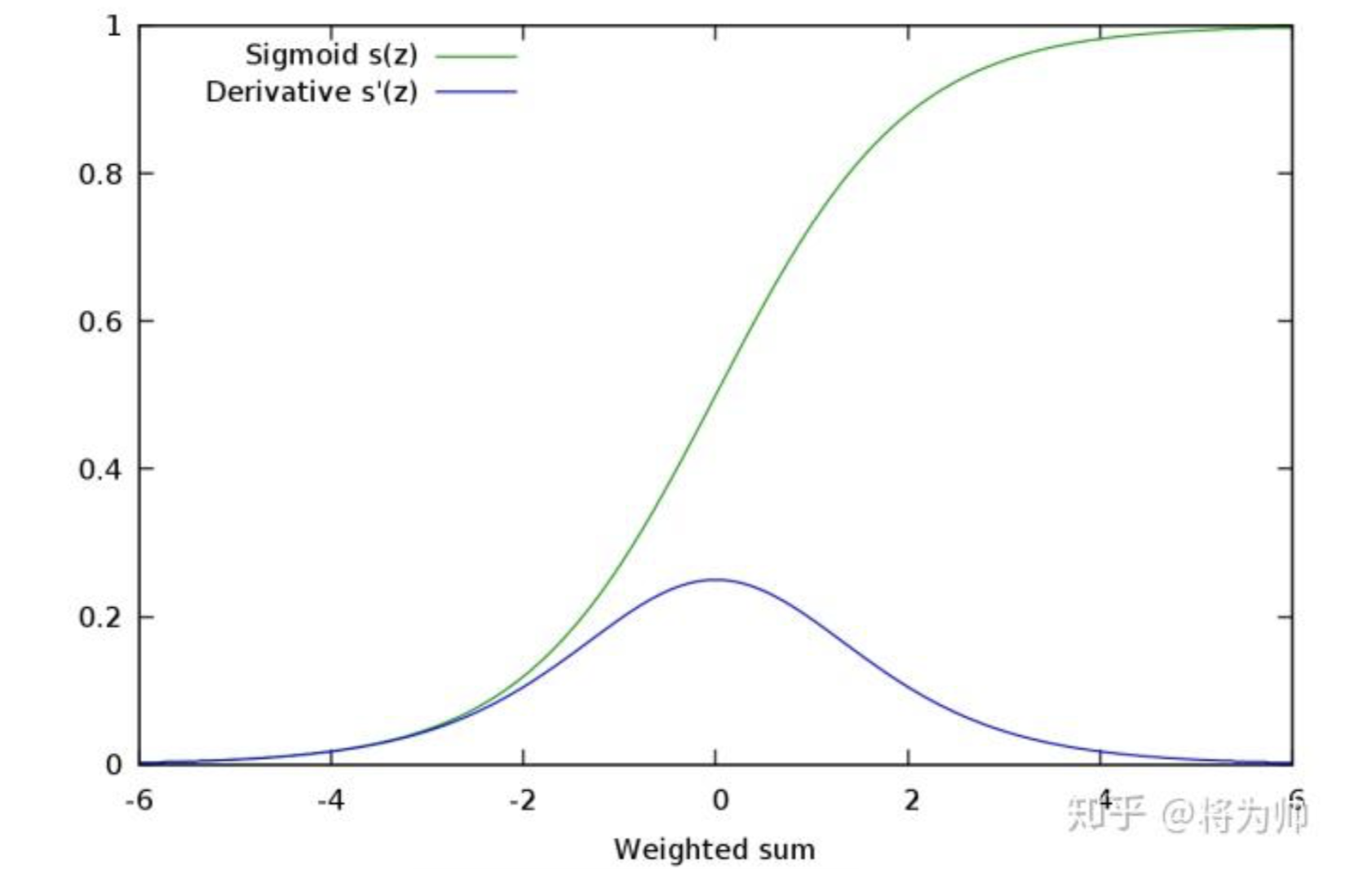
存在问题:梯度消失
例如,一个网络由4个神经元线性组成,神经元的激活函数都为Sigmoid:

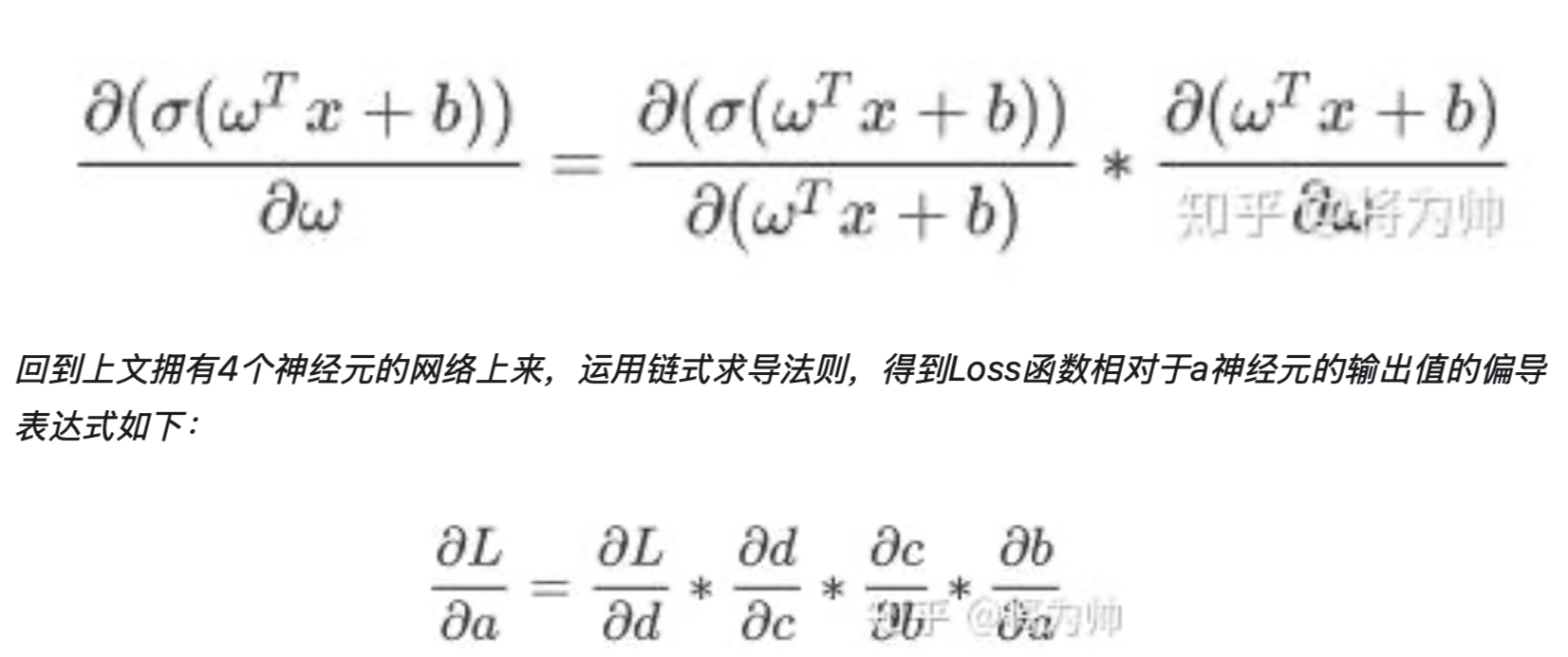
当我们求激活函数输出相对于权重参数w的偏导时,Sigmoid函数的梯度是表达式中的一个乘法因子:
以d对c的导数举例,展开如下:

式子的中间项是Sigmoid函数的梯度。
即,拥有4个神经元的网络的Loss函数相对于第一层神经元a的偏导表达式中就包含4个Sigmoid梯度的乘积。
多个范围在(0,0.25)的数的乘积,将会是一个非常小的数字 —— 极小的梯度无法让参数得到有效更新。
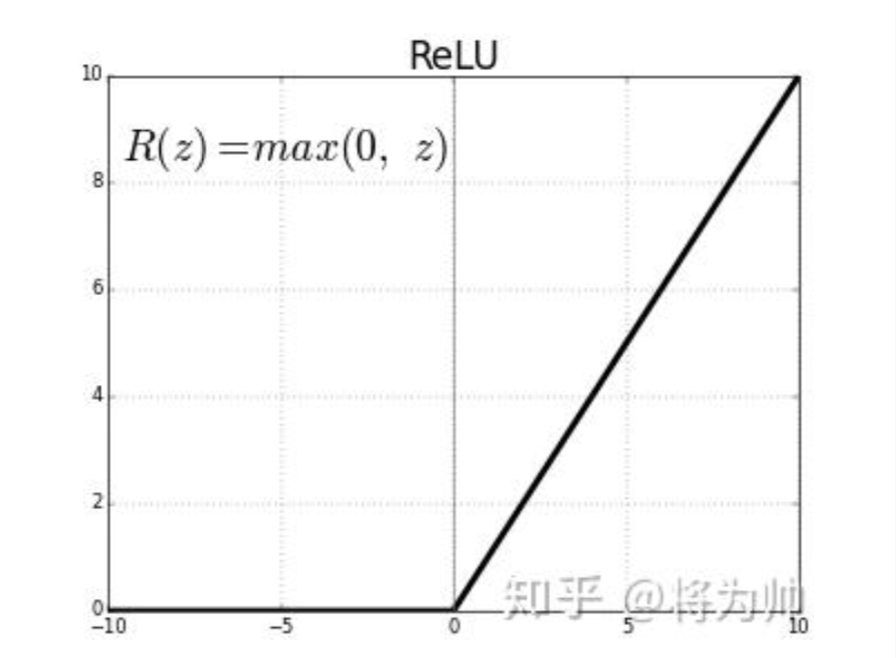
2 ReLU 函数
ReLU激活函数的提出就是为了解决梯度消失问题。
ReLU的梯度只可以取两个值:0或1
ReLU的梯度的连乘不会收敛到0 ,连乘的结果也只可以取两个值:0或1。
- 如果值为1,梯度保持值不变进行前向传播;
- 如果值为0,梯度从该位置停止前向传播。
单侧饱和
把神经元想象为检测某种特定特征的开关,高层神经元负责检测高级的/抽象的特征(有着更丰富的语义信息),例如眼睛或者轮胎;低层神经元负责检测低级的/具象的特征,例如曲线或者边缘。
当开关处于开启状态,说明在输入范围内检测到了对应的特征,且正值越大代表特征越明显;用负值代表检测特征的缺失。
单侧饱和还能使得神经元对于噪声干扰更具鲁棒性。负值的大小引入了背景噪声或者其他特征的信息,会给后续的神经元带来无用的干扰信息;且可能导致神经元之间的相关性(重复信息)。在负值区域单侧饱和的神经元则不会有上述问题:噪声的程度大小被饱和区域都截断为0,避免了无用信息的干扰。
存在问题:神经元“死亡” (dying ReLU problem)
激活函数的输入值有一项偏置项(bias),假设bias变得太小,则输入激活函数的值总是负的,那么反向传播过程经过该处的梯度恒为0,对应的权重和偏置参数此次无法得到更新。
3 LeakyReLU
LeakyReLU可以解决神经元”死亡“问题。
LeakyReLU输入小于0的部分,值为负,且有微小的梯度。LeakyReLU的α取值一般为0.01。
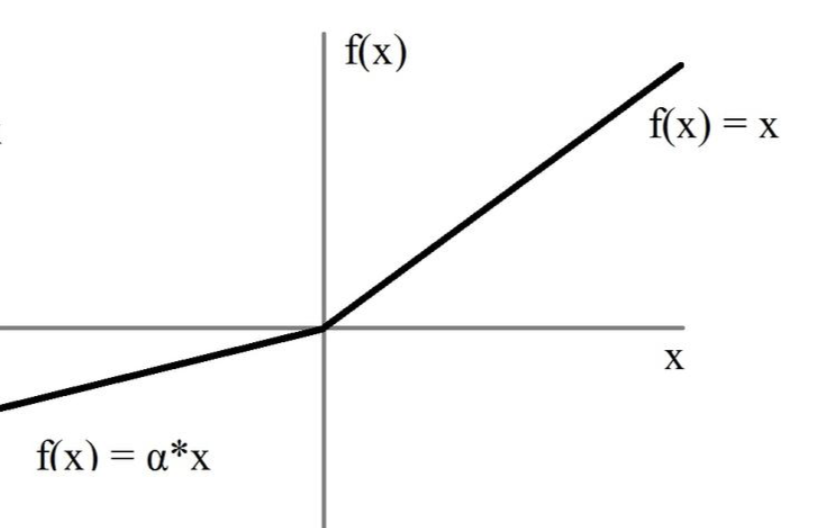
在反向传播过程中,对于LeakyReLU激活函数输入小于零的部分,也可以计算得到梯度(而不是像ReLU一样值为0)
如何选择合适的激活函数?
先试试ReLU的效果如何。ReLU相较于其他激活函数,有着最低的计算代价和最简单的代码实现。
如果ReLU效果不太理想,下一个建议是试试LeakyReLU或ELU。经验来看:有能力生成零均值分布的激活函数,相较于其他激活函数更优。
需要注意的是使用ELU的神经网络训练和推理都会更慢一些,因为需要更复杂的指数运算得到函数激活值,如果计算资源不成问题,且网络并不十分巨大,可以事实ELU;否则,最好选用LeakyReLU。
如果有很多算力或时间,可以试着对比下包括随机ReLU和PReLU在内的所有激活函数的性能。
当网络表现出过拟合时,随机ReLU可能会有帮助。
对PReLU来说,因为增加了需要学习的参数,当且仅当有很多训练数据时才可以试试PReLU的效果。
epoch, batch, iteration
一个epoch指的是把所有训练数据丢进神经网络一次。
由于训练数据常常太大了,不能够一口吃掉一个胖子,得慢慢来,所以我们常常把训练数据分成好几等份,分完之后每份数据的数量就是 batch size,而几等份的这个几就是iteration。
epoch:指的是次数,epoch = 10 指的是把整个数据集丢进神经网络训练10次。
batch size:指的是数据的个数,batch size = 10 指的是每次扔进神经网络训练的数据是10个。
iteration:同样指的是次数,iteration = 10 指的是把整个数据集分成10次扔进神经网络。