Actor-Critic
Actor-Critic 算法本质上是基于策略的算法,因为这一系列算法的目标都是优化一个带参数的策略,只是会额外学习价值函数,从而帮助策略函数更好地学习。
Actor-Critic 算法则可以在每一步之后都进行更新,并且不对任务的步数做限制。
更一般形式的策略梯度
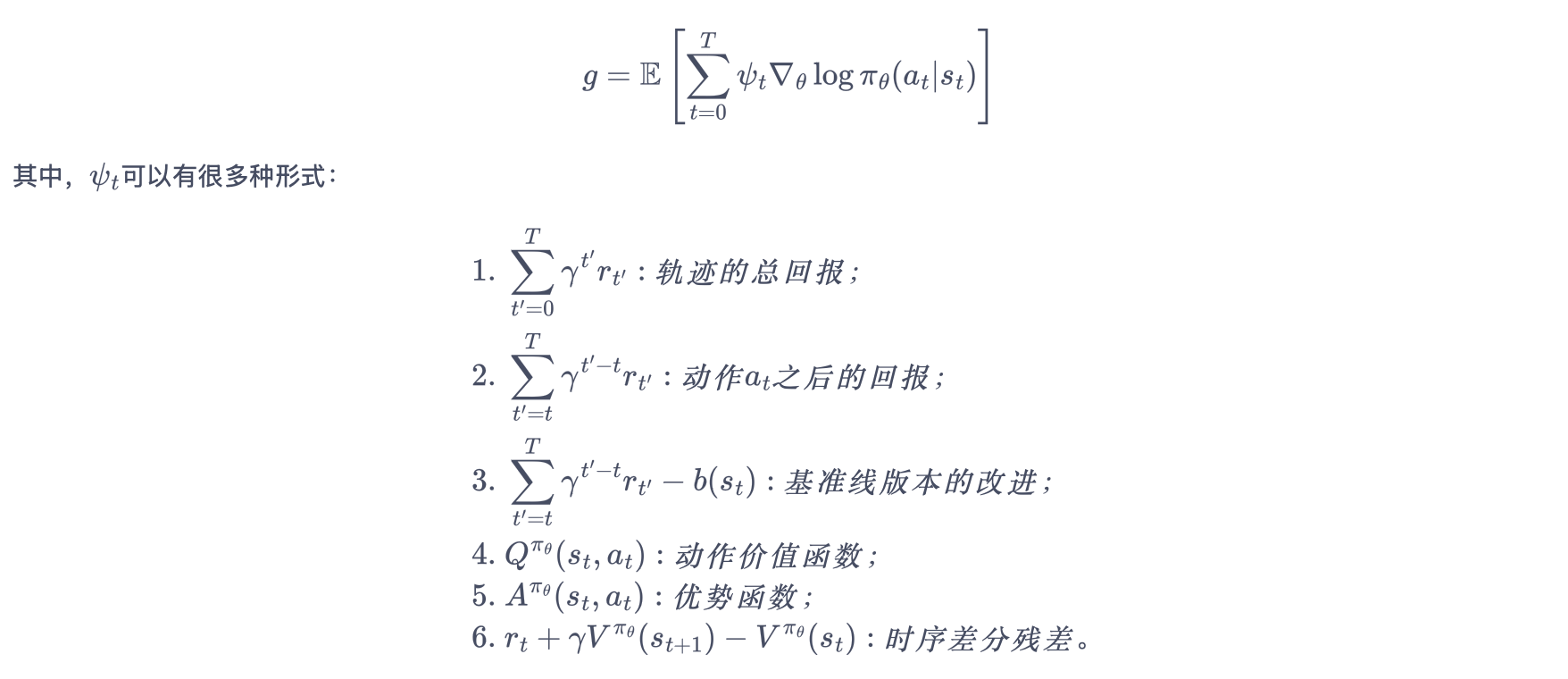
1. Actor(策略网络)
Actor 要做的是与环境交互,并在 Critic 价值函数的指导下用策略梯度学习一个更好的策略。
Actor 的更新采用策略梯度的原则。
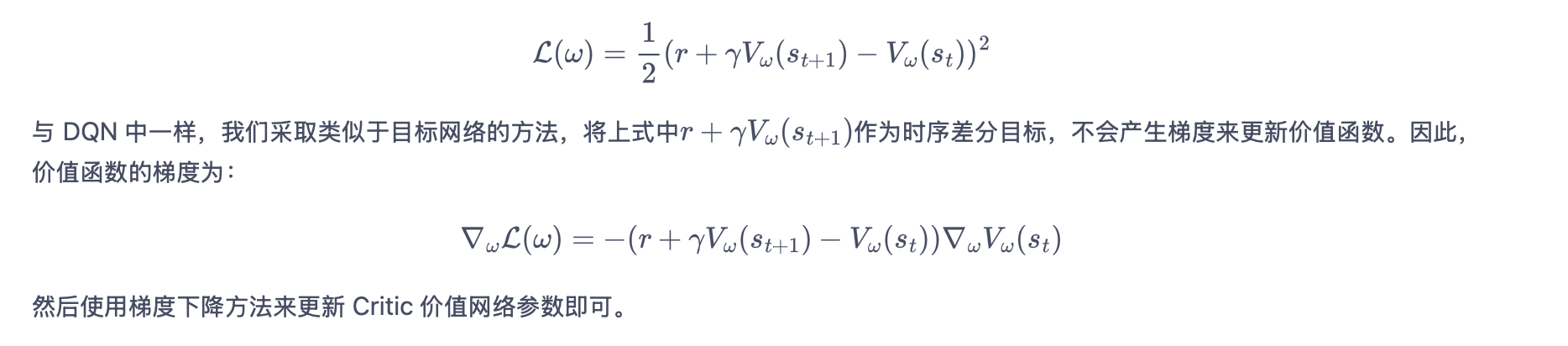
2. Critic(价值网络)
Critic 要做的是通过 Actor 与环境交互收集的数据学习一个价值函数,这个价值函数会用于判断在当前状态什么动作是好的,什么动作不是好的,进而帮助 Actor 进行策略更新。
价值函数的损失函数:
Actor-Critic 算法的具体流程:
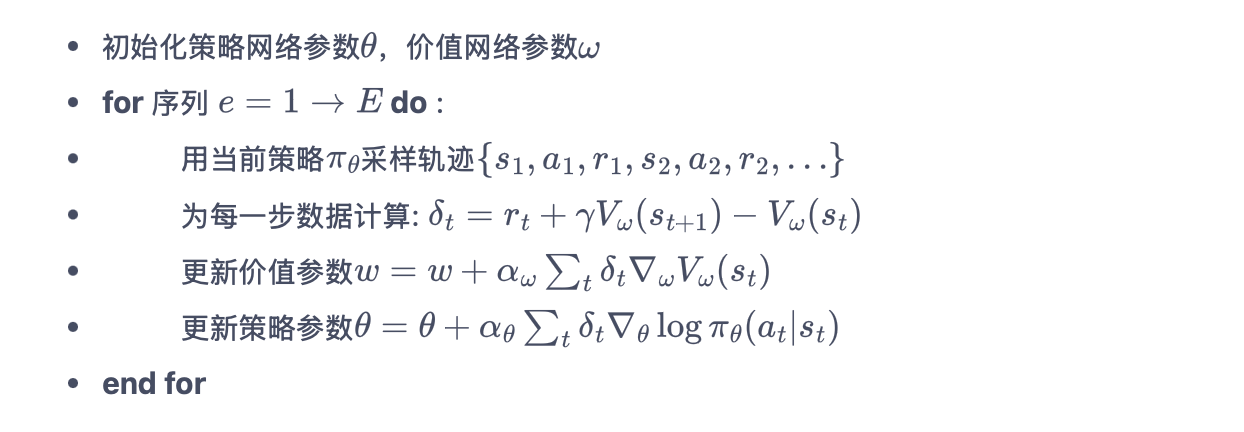

策略网络(Actor):参数为 θ,定义策略 πθ(a∣s),输出动作的概率分布。
价值网络(Critic):参数为 ω,输出状态价值 Vω(s),评估当前状态的好坏。
import gym
import torch
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
import rl_utils
定义策略网络
PolicyNetclass PolicyNet(torch.nn.Module): def __init__(self, state_dim, hidden_dim, action_dim): super(PolicyNet, self).__init__() self.fc1 = torch.nn.Linear(state_dim, hidden_dim) self.fc2 = torch.nn.Linear(hidden_dim, action_dim) def forward(self, x): x = F.relu(self.fc1(x)) return F.softmax(self.fc2(x), dim=1)定义价值网络
ValueNet输入是某个状态,输出则是状态的价值。
class ValueNet(torch.nn.Module): def __init__(self, state_dim, hidden_dim): super(ValueNet, self).__init__() self.fc1 = torch.nn.Linear(state_dim, hidden_dim) self.fc2 = torch.nn.Linear(hidden_dim, 1) def forward(self, x): x = F.relu(self.fc1(x)) return self.fc2(x)定义
ActorCritic算法包含采取动作(
take_action())和更新网络参数(update())两个函数。class ActorCritic: def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr, gamma, device): self.actor = PolicyNet(state_dim, hidden_dim, action_dim).to(device) # 策略网络 self.critic = ValueNet(state_dim, hidden_dim).to(device) # 价值网络 self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=actor_lr) # 策略网络优化器 self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=critic_lr) # 价值网络优化器 self.gamma = gamma self.device = device def take_action(self, state): state = torch.tensor([state], dtype=torch.float).to(self.device) probs = self.actor(state) action_dist = torch.distributions.Categorical(probs) action = action_dist.sample() return action.item() def update(self, transition_dict): states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device) actions = torch.tensor(transition_dict['actions']).view(-1, 1).to( self.device) rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1, 1).to(self.device) next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device) dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1, 1).to(self.device) # 时序差分目标 td_target = rewards + self.gamma * self.critic(next_states) * (1 - dones) td_delta = td_target - self.critic(states) # 时序差分误差 log_probs = torch.log(self.actor(states).gather(1, actions)) actor_loss = torch.mean(-log_probs * td_delta.detach()) # 均方误差损失函数 critic_loss = torch.mean( F.mse_loss(self.critic(states), td_target.detach())) self.actor_optimizer.zero_grad() self.critic_optimizer.zero_grad() actor_loss.backward() # 计算策略网络的梯度 critic_loss.backward() # 计算价值网络的梯度 self.actor_optimizer.step() # 更新策略网络的参数 self.critic_optimizer.step() # 更新价值网络的参数在车杆环境上训练
actor_lr = 1e-3 critic_lr = 1e-2 num_episodes = 1000 hidden_dim = 128 gamma = 0.98 device = torch.device("cuda") if torch.cuda.is_available() else torch.device( "cpu") env_name = 'CartPole-v0' env = gym.make(env_name) env.seed(0) torch.manual_seed(0) state_dim = env.observation_space.shape[0] action_dim = env.action_space.n agent = ActorCritic(state_dim, hidden_dim, action_dim, actor_lr, critic_lr, gamma, device) return_list = rl_utils.train_on_policy_agent(env, agent, num_episodes)