Below you will find pages that utilize the taxonomy term “AD”
April 11, 2025
数据集-NuSences
内容
nuScenes 包含 1000 个场景,大约 1.4M 的相机图像、390k LIDAR 扫描、1.4M 雷达扫描和 40k 关键帧中的 1.4M 对象边界框。
nuScenes-lidarseg 包含 40000 个点云和 1000 个场景(850 个用于训练和验证的场景,以及 150 个用于测试的场景)中的 14 亿个注释点。
数据采集
车辆设置
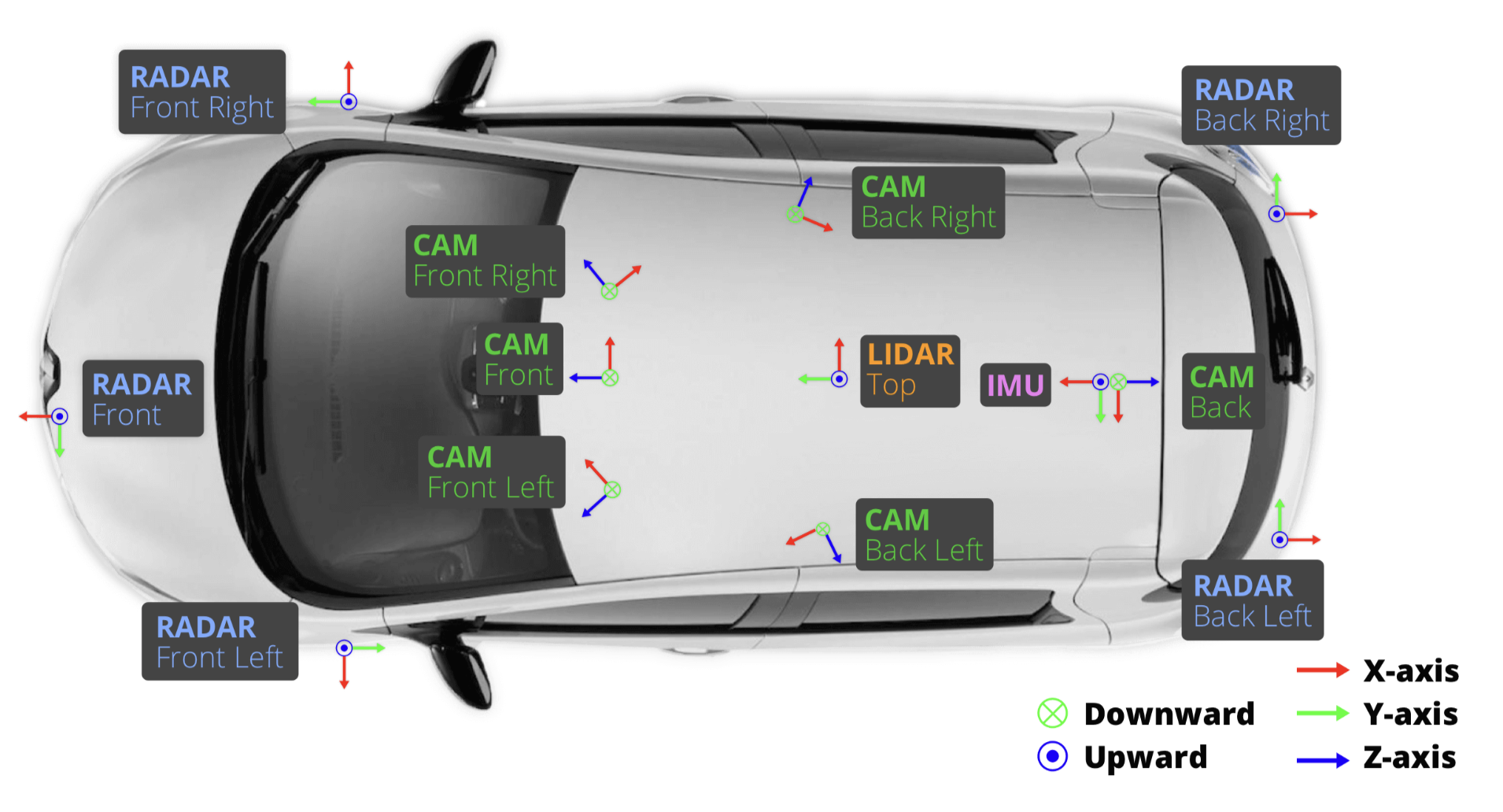
- 1 个旋转激光雷达 (Velodyne HDL32E)
- 5 个远程雷达传感器 (Continental ARS 408-21)
- 6 个相机 (Basler acA1600-60gc)
- 1个 IMU & GPS (高级导航空间版)
Sensor(传感器)校准 - 内外参
- LIDAR extrinsics
- 相机 extrinsics
- RADAR extrinsics
- 相机 intrinsic 校准
Sensor(传感器)同步
实现跨模态数据对齐:当顶部 LIDAR 扫描相机 FOV 的中心时,会触发相机的曝光